MATLAB雷达目标航迹模拟器的ARM软件设计和实现(3)
2. 微处理器:接收PC端传输的数据,根据用户所设置的各项参数,产生模拟的目标航迹;同时将用户对转台的控制信息转发给转台,接收转台发送的数据;根据转台的信息,进行航迹交汇判断,将结果发送给PC。
3. 转塔:接收微处理器传输的控制参数,根据用户所设置的参数,对雷达波束扫描过程进行模拟,并将实时数据传递给微处理器。
针对雷达目标航迹模拟器的功能设计,考虑系统设计过程中的可行性,我们使用PC模拟转台。PC、微处理器、转塔三者之间的通信是本系统的重要组成,我们对雷达完整工作过程中的参数进行简化和分析,建立通信协议,使用串口用于上述三方之间的通信。通信协议所涉及的各项参数将在本文下文有所涉及,具体的协议规定出于保密原则暂不描述。
本文研究、设计的重点在于上述三者中的微处理器,本文将根据微处理器的需要实现的功能,对其做出软件设计和实现。因此为了便于之后的研究与设计,我们主要针对微处理器,配合几个通信串口,将模拟器的工作过程描述如下:
1. PC操控软件通过232串口向板1发出控制参数,包括波束宽度,航迹数目,航迹类型,各起始点的参数(目标起始方位角、起始径向距离、速度方位角),以0XFF结束通信。
2. 操控软件通过485串口向板1发出控制参数,包括扫描方式,波形类型等。
3. 板1通过422串口向转塔发控制参数,控制转塔扫描方式、扫描速度等。
4. 转塔接收到板1的控制参数,遵从控制命令开始扫描,再通过422串口向板1发送角位置、故障和状态信息。
5. 板1接收到转塔信息后,根据交汇条件判断目标和雷达波束是否交汇,再通过485串口向操控软件发送交汇到的目标信息、控制字应答信息、天线位置和系统工作状态。
6. 操控软件依据接收到的数据,画出目标航迹,输出北斗信息等。
根据上述工作过程,我们开始对系统结构进行设计,设计的实验验证方案如图2.2所示。
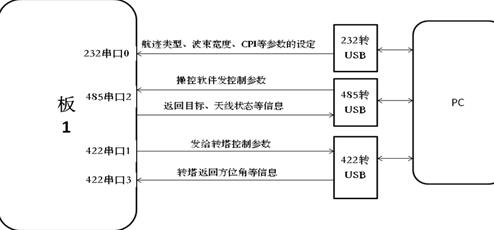
图2.2 实验验证方案
2.3 模拟器具体结构
根据上文对模拟器功能的设计,我们需要选择合适的微处理器,并配置合适的外围器件以满足系统功能的需求。
之所以选择微处理器实现模拟器系统中航迹模拟的功能,是出于如下考虑的:对于便携式雷达模拟器来说,因体积限制无法使用PC;一般的模拟器所采用的单片机因为功能差,运算速度慢,扩展能力弱,不适合用于此模拟器,所以需要使用嵌入式系统来实现人机交互和信号处理。
一般来说,嵌入式系统具有响应速度快、软件代码小、高度自动化等特点。对于此次雷达目标航迹模拟器的研究来说,嵌入式系统比一般的PC系统更适合多任务、对实时性要求高的体系 。
嵌入式系统的核心在于处理器,根据雷达目标航迹模拟器的功能,我们需要的微处理器需具备如下特点:体积小、成本低、性能好,出于模拟器系统的实时性要求,微处理器需具备快速执行指令的能力,出于模拟器系统的通信需求,所选择的微处理器芯片需具备多接口扩展的能力。
ARM(Advanced RISC Machines),既可以看成是一家公司的名字,也可以看成是一类微处理器的通用称呼,还可以看成是一种技术的名字 。
ARM微处理器采用RISC架构,一般具有以下特点 :
体积小、低成本、低功耗、高性能;
支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件;