雷达目标航迹模拟器的PC界面设计和实现(3)
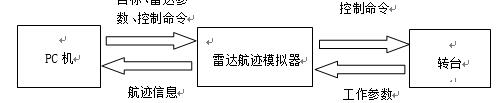
图2.2.1 雷达目标航迹模拟器总体结构
模拟器的各模块功能如下:
1. PC机:用户通过界面软件设置目标运动初始参数、雷达性能参数、控制参数等,并将数据发送至雷达航迹模拟器;接收来自雷达目标航迹模拟器的数据,显示航迹点迹。
2.雷达航迹模拟器:接收来自PC端传输的数据,根据初始化参数模拟目标航迹,发送转台控制命令,接收转台工作参数,进行航迹判断,将数据发送给PC端。
3.转台:接收雷达航迹模拟器的控制参数,将波束方位信息发送给雷达航迹模拟器。
下一篇:L波段锁相环的设计+文献综述