matlab调炮指令与火炮跟踪平稳性和快速性的研究(2)
现代防空高炮有火力猛、持续作战能力强、反应速度快、可靠性高、成本低廉、抗干扰性能好等优点,但也存在有效杀伤距离较近的不足。另一方面,防空导弹有较大的防空区域和很高的毁歼概率,所以其地位和作用正逐渐超过高炮。曾有观点认为防空导弹最终将完全取代高炮,但后来被证实此观点过于偏激,防空导弹有较大的近界杀伤死区,而且导弹要发挥正常作战效能需要掌握一定的制信息权和制电磁权。从近几次局部战争来看,较弱方几乎完全丧失制电磁权,反而高炮发挥了较好作用。因此,高炮和防空导弹各有优势和局限性,现代高炮系统是拦截低空、近距离空袭目标的有效手段,是较合理的防空体系的重要组成部分。
1.3 课题所研究的主要内容
本文主要实现控制系统设计,在确定火炮执行电机数学模型基础上,设计电流环、速度环和位置环三环控制系统,实现火炮伺服系统的平稳快速跟踪,并通过matlab动画仿真检验设计成果。
2 火控伺服系统介绍
2.1 火控伺服系统的分类
伺服系统的输入主令是随时间变化的函数,系统的输入信号和输出反馈信号经求差、校正综合后,产生放大功率,通过执行机构控制被控对象以一定的精度复现要求的状态输出。根据输出状态是被控对象的位置或速度,伺服系统可分为位置伺服和速度伺服系统。考虑到速度伺服系统和位置伺服系统的共性,我们只论述位置伺服系统。火炮位置伺服系统属于机械运动控制,输出状态是武器的瞄准线或射击线的角位置。按输入的不同分为位置跟踪伺服系统和定位伺服系统。输入的位置随时间任意变化的系统称位置跟踪伺服系统。此类系统的位置主令含有位置的一阶、二阶乃至高阶导数,其控制要求最复杂,难度最大。它主要应用于防空反导武器、舰载武器、坦克装甲车辆、稳定平台、炮瞄雷达,以及可见光、红外、夜视等光电跟踪系统。定位伺服系统的输入是常量,这里我们不论述。伺服系统按执行机构类型可分为电气伺服系统、电液伺服系统、气动伺服系统,它们在控制特性和执行机构上存在不同[2]。在分析系统时,各环节和系统的模型、传递函数都可抽象统一。我们研究的是电气伺服系统。下图给出电气伺服系统结构框图
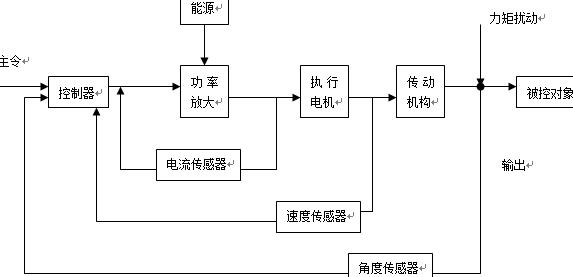
图2.1 电气伺服系统结构框图
图中控制器可以有很多功能,可以是模拟控制器,也可以是数字控制器及算法程序。框图属于原理图。实际结构和信息传输路径不一定完全相符。
2.2 高炮随动系统简介
随动控制系统的作用是在给定量规律无法实现确定时,让输出量能够准确快速跟踪输出量的变化。它在工业、交通和国防部门得到广泛应用。高炮随动系统属于执行系统,它可以不断赋予高炮正确的方位角和高低角,一般功率较大,因为高炮经常射击距离较近的高速空中目标,所以需要其身管转动速度和加速度足够大,以满足对目标连续射击的要求。瞄的准才能打的准,射击时对炮身精度要求很高。相比而言,防空导弹对发射瞬间的方位角和高低角要求不是很高,所以一般高炮随动系统的技术水平远高于导弹的随动系统。