MATLAB双车协同模式下电磁导引车控制算法设计(3)
2.1 双车协同模式下电磁导引车设计要求
电磁导引是通过赛道下铺设的电流线产生的磁场进行循迹,参赛队伍要采用B型车模,前轮转动,后轮驱动,如图2.1所示。本次竞赛为双车模同时运行比赛方式,两车之间没有有形的物理连接,同时出发,第一辆车出发后开始计时,当第二辆车通过终点后比赛结束,停止计时。令 和 分别为第一辆和第二辆车跑完全程的时间,其比赛时间记为:
即这次的竞赛不仅要求智能车能够快速地跑完全程,还要求两车之间不能相距太远,保证两车通过的终点的时间差最短。两车模之间可以通过光电、摄像头传感器或者无线通讯跟踪前车。所以为了尽快的完成比赛,需要保证两车在行驶过程中不相撞,并且尽可能同时通过终点。
图2.1 电磁组B型车模
2.2 双车协同模式下电磁导引车系统组成结构
根据上述对智能车设计的要求,接下来将按模块来进行智能车的设计,由于两辆车的系统组成结构一样,以其中一辆智能车为例,对智能车的系统结构进行分析。智能车系统的复杂性决定了较多的设计模块,主要包括:前轮转向模块、后轮驱动模块、编码器测速模块、电磁信号放大模块、人机交互模块和双车协同模块等。其总体的设计框图如图2.2所示。
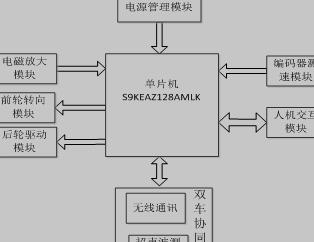
图2.2 系统总体组成结构
下面对主要设计的模块进行说明:
(1)单片机最小模块:单片机是系统的重要组成模块,本次采用EA系列的芯片,单片机对采集过来的电磁信号进行处理,根据电感信息对电机和舵机产生控制,使各个模块协调运行。
(2)电源管理模块:为智能车上述的各个模块分配相应的电压。
(3)编码器测速模块:利用编码脉冲对电机测速,这个模块是形成电机闭环控制的重要环节,最后将得到的脉冲数反馈给单片机。
(4)人机交互模块:因为在双车协同模式下,以及在调试的过程中需要显示一些信息,我们采用显示屏和按键来进行人机交互。
(5)电磁放大模块:检测赛道上的路况信息,然后使单片机驱动舵机和电机,为它们的控制信号提供依据。
(6)前轮转向模块:舵机根据单片机给定的PWM信号进行转向的控制。
(7)后轮驱动模块:根据收到的控制信号驱动电机的运转,并对控制信号进行隔离转换成可以驱动电机的电压信号。
(8)双车协同模块:这里我们采用蓝牙通讯和超声波测距模块,通过两车之间的通讯得到前后两车的速度,利用超声模块得到间距,与单片机进行交互,来控制后车的速度,使双车可以协同行驶。
2.3 双车协同模式下电磁导引车工作原理
智能车前方的电磁传感器不断采样赛道上的路况数据,经过放大电路将电压信号传给单片机,单片机对获取的传感器的信号,进行滤波处理,并对此时智能车所处的运行状态进行相应的判断,进而给出相应的控制信号,来控制电机和舵机的运行,从而使小车能够稳定地沿赛道的中心线循迹。在调试的时候,采用显示屏和按键来进行人机间的信息交互,对智能车进行实时监控。在本次竞赛中,加入了双车协同模块,利用蓝牙模块进行两车之间的通讯,得到各自的速度,同时利用超声波检测两车之间的距离,将得到的数据给单片机。这时,第二辆小车将根据前车的速度以及两车间的距离控制自身的速度,使两车之间保持一个安全稳定的距离,并且快速地运行完全程。由于两辆车的工作原理类似,这里只介绍了一辆智能车系统的工作原理,两辆车之间具体的协同控制原理将在下文中介绍。
上一篇:基于视频的智能小车运动信息解算