MATLAB基于模糊模型的倒立摆智能控制与仿真研究(2)
总的来说,该控制问题包括获得系统的动态模型,并使用动态模型来测定控制规律或策略,来达到欲求的系统反馈和表现。这种控制算法虽然简单,但是要在现实情况下,确保闭合回路系统的稳定性和鲁棒性,却是一项富有挑战性的任务。像能源系统、导弹系统、机器人系统、倒立摆、工业处理、混沌电路等动态系统,从本质上来说,都是高度非线性的,因此对这些系统的控制很有难度[ ]。
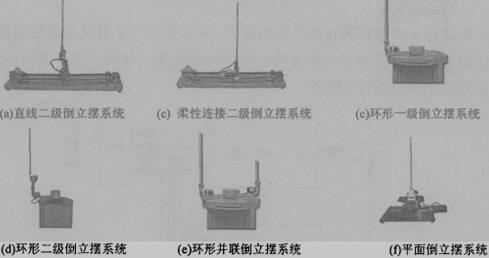
图1.1 各类倒立摆系统
1.2 研究现状
1.2.1 稳定问题的研究
1.2.2 智能控制理论的方法
2 倒立摆控制系统及其建模
2.1 倒立摆系统特性分析
倒立摆系统拥有如下一些特性:
(1)不确定性。指的是在其进行数学建模是的不确性因素例如各种误差、机电传送中的非线性部分以及噪声里面的无法量化部分。
(2)耦合特性。倒立摆的各个部分之间具有耦合性。因此倒立摆的驱动部分可以是单极的。
(3)欠冗余性。倒立摆系统大多数是由单电机驱动的。为了节省开始并且使空间变得更大所以通常采用欠冗余的设计。
(4)开环不稳定系统。倒立摆有两个平衡状态:向上和向下。其中向上的状态是不稳定的,向下的状态是稳定的。因此,只要外界扰动大于一定数值,系统都会由向上的不稳状态进入向下的稳定状态。
(5)射非线性系统。所以倒立摆系统能够用几何微分法进行设计。
由上面几条特性,设计者常常会忽视一些细小但比较重要的因素,比如由电机产生的摩擦力、空气阻力、齿轮之间的缝隙、杆子的密度不同、相连处的松紧程度、带子的柔韧性等。