伺服稳定平台结构设计(3)
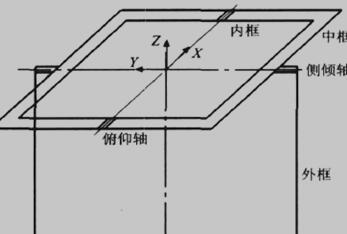
图2.1 串联框架式稳定平台
图2.2 并联稳定平台
串联平台承载力小,但灵活性高,适宜应用在大范围灵活运动的场合;与串联机构对比,并联机构的主要优点是结构简单、承载力大、刚度大、精度高,尤其是反应迅速,适宜用在承载及精确定位等方面[15-19]。基于设计要求负载较大的原因,采用并联结构。
2.1.2 设计方案选择
隔离运动要求消除载体俯仰与横滚的影响,因此需要机构在俯仰、横滚方向具有两个自由度。故系统设计的稳定平台结构拟采用如图2.3的形式。主要由平台面、防水套筒、纵摇传动系统、横摇传动系统、支撑主轴和平台底座组成。平台面作用:在其表面固定一定质量的负载;防水套筒作用:丝杠在上下运动过程中,防止水渗入,损坏电机;纵摇传动系统:由伺服电机、丝杠和螺母组成,通过伺服电机带动丝杠一起转动,使的螺母向上运动,推动(拉伸)平台运动,完成纵摇传动;横摇传动系统:同纵摇传动系统工作原理一致;支撑主轴:该轴布置于平台中心位置,一方面要支撑整个平台和负载;另一方面使控制软件编程较为简单;平台底座:固定支撑作用。