基于图像的工件抓取直角坐标机器人设计+CAD图纸(3)
2.4 机器人外形图
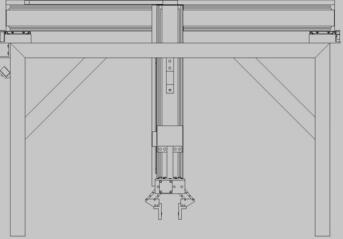
图1.直角坐标机器人外形图
3 机械手的设计
机械手是用来握持工件的部件。常用的机械手按其握持原理可以分为:夹持类,吸附类两大类,考虑到吸附类夹取的零部件的特点是表面光滑、材料易碎和质量较重,相比之下,因此我选择的是夹持类机械手。
夹持类手部又可分夹钳式、托勾式和弹簧式。根据本设计的要求,最终选用的手爪为夹钳式,同时它特是工业机器人中最常见的一种手爪。
本设计机械手外形图2.如下:
机械手外形图
本设计中,使用了齿轮传动的方式,将齿轮与连杆同轴固定,通过电机带动齿轮正反旋转从而带动平行四连杆机构使得手指平动来夹取工件。
3.1 传动方式的研究分析
机械的传动方式有很多种,在此从中选取了几种方式做了比较,来判断哪种更适合本设计:
(1)带传动,其传动平稳,有缓冲吸振以及过载保护的作用。但在传动过程中有弹性滑动,传动比不能保持恒定,传动中心距较大。
(2)链传动,其瞬时速度不均匀,有冲击、动载和噪音,传动中心距大,并且其寿命较短。它适用于低速传动,可在恶劣条件下可靠工作。
上一篇:腐蚀工质塑料换热器设计