基于CAN总线通信的LED照明控制系统设计(6)
2.4CAN总线工作原理
当CAN总线上一个节点发送报文帧时,报文帧中含有目的CAN节点的地址,将以报文形式在CAN总线上传输,当且仅当与目的地址相符的节点接收报文帧。每组报文帧的仲裁域(标准帧为11位或扩展帧为29位)定义报文顿的优先级,仲裁域二进制值越低,优先级越高[8]。
CAN总线上用两个互补的逻辑值“0”、“ 1”分别表示CAN总线上显性(Domination)和隐性(Recessive)两种状态。当总线之间差分电压低于0.5 V,总线处于隐性状态(逻辑“1”);当总线之间差分电压高于1 V,总线处于显性状态(逻辑“0” )。若总线同时发送显性和隐性位,则总线上为显性位状态(相当于逻辑“1”和逻辑“0”相与为逻辑“0” )。报文帧是以CAN_H、CAN_L上之间差分电压形式传输。当总线处于隐性状态即逻辑“1”时,CAN_H、CAN_L物理接口电压值平均电压2.5 V左右,差分电压几乎为0V;在显性状态即逻辑 “0” 时候,CAN_H、CAN_L差分电压至少大于显性位阈值电压。CAN总线电平标称值如下图所示。
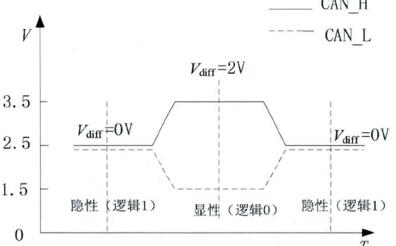
图2.1 CAN总线电平标称值
2.5 CAN总线节点组成
CAN总线单元节点由总线收发器、总线控制器、微控制器、执行器、传感器、网络适配器和监控节点(如PC机)等组成
下一篇:基于FPGA的电机控制器设计