基于CAN的现场总线控制系统步进电机驱动模块设计(3)
系统框图如图2.1所示,系统的硬件主要由步进电机PM42S-048-TT04的驱动模块、基于SJA1000的CAN总线通信模块、基于STC89C52的单片机控制模块、LED显示模块几个模块构成。驱动模块接收单片机发出的脉冲信号, 通过驱动模块输出就使步进电机按照程序设置旋转;单片机除了用于控制驱动模块的输出脉冲之外,还用于检测并响应按键,按键用以改变步进电机的运行状态同时也是CAN的发送命令;CAN总线通信模块主要用于节点之间信息的传输,节点1按键发送信息,节点2接收并在LED模块中显示信息。
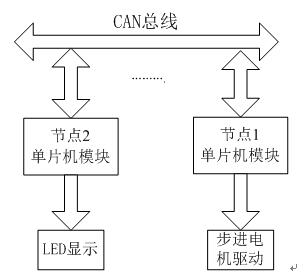
图2.1 系统框图
2.2 步进电机驱动模块设计
2.2.1 步进电机简介
步进电机是将电脉冲信号转变为角位移的开环执行元件,它能够在开环条件下达到精确度极高的定位,并且具有价格低廉、无累计误差、易于控制等优点,所以被广泛应用于经济型的开环定位系统中。步距角是步进电机的一个固有特性,它是指在步进驱动器接收到脉冲信号时,步进电机被电磁转矩驱使转动的固定的角度。一个脉冲信号对应一个固定的旋转角度的线性关系,加上步进电机没有累积误差的特点,使得速度、位置等的精准控制变得非常简单[9~10]。
按照步进电机的基本构造和工作原理,一般分为反应式步进电机、永磁式步进电机、混合式步进电机三种类型。三类电机区别不大,相较于反应式步进电机,永磁式步进电机控制功率小、噪声振动小,主要是应用场合不同,由于本课题的实验性质,所以选用的电机是永磁式步进电机PM42S-048-TT04,额定电压5V,额定转矩1N •M,步距角为7.5°,其实物图如附录B所示,贴上胶带以更明显地显示步进电机的运转速度和方向。
永磁式步进电机结构示意图如图2.2所示,因其定子冲压成爪型又称为爪极式步进电机,永磁式步进电机的转子是由永磁体打造形成的,它的基本工作原理是定子绕组通电激励形成的磁场与永磁体转子建立的磁场之间的相互作用形成了电磁转矩驱使步进电机旋转,当定子绕组励磁产生的合磁场发生旋转时,转子会因为电磁转矩的作用同步转动[11]。
图2.2 永磁式步进电机的结构示意图
2.2.2 步进电机驱动技术
步进电机驱动控制简单、没有累计误差,所以被广泛应用于经济型的定位精度要求高的系统中,但是它也有两个固有的缺点,一是低速转动时会产生较大的振动和噪音,二是当输出脉冲频率突变过大时步进电机容易丢步、过冲甚至堵转,而电机本身这两个固有的问题可以通过驱动技术来弥补,所以在使用步进电机定位的系统中,输出脉冲的频率及电机本身的步距角的选取都极为关键。目前步进电机的驱动方式主要有整步驱动、半步驱动和细分驱动三种,三者有区别也有联系。随着驱动方式的改变,步距角逐渐被细化,电机的运转也更加平稳[12,13]。